Fun with FuseSoC - Hackster.io
Hardware componentsDigilent Arty S7-50×1Buy from NewarkBuy from digilent.comBuy from AvnetBuy from store.digilentinc.comDigilent Arty A7: Artix-7 FPGA Development Board×1Digilent Cmod S7: Breadboardable Spartan-7 FPGA Module×1Digilent Cmod A7-35T: Breadboardable Artix-7 FPGA Module×1krtkl snickerdoodle×1Avnet MicroZed×1Avnet ZUBoard 1CG×1Software apps and online servicesAMD Vivado Design SuiteFuseSoc
Hardware componentsDigilent Arty S7-50×1Buy from NewarkBuy from digilent.comBuy from AvnetBuy from store.digilentinc.comDigilent Arty A7: Artix-7 FPGA Development Board×1Digilent Cmod S7: Breadboardable Spartan-7 FPGA Module×1Digilent Cmod A7-35T: Breadboardable Artix-7 FPGA Module×1krtkl snickerdoodle×1Avnet MicroZed×1Avnet ZUBoard 1CG×1Software apps and online servicesAMD Vivado Design SuiteFuseSoc
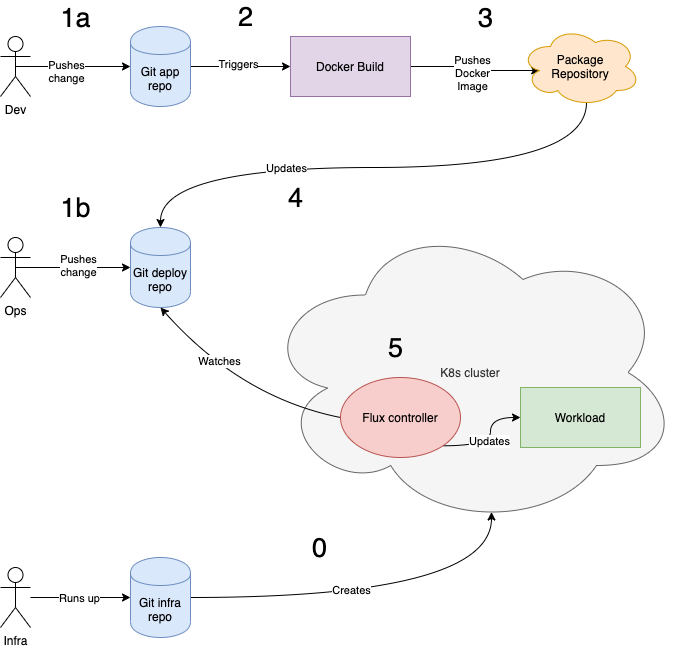
Introduction One of the things you quickly learn as a professional FPGA engineer is the GUI is rarely used in development.Scripting is used for several reasons however, the key reasons areConsistency - Scripts enforces a consistent configuration across the runs and environment. Version Control - Scripting enables easy integration with version control tools Automation - Scripting enables integration with Continuous Integration. In this project we are going to be examining a build system and package manager called FuseSoC. FuseSoC is intended to encourage reuse of IP, along with easing the build and simulation of FPGA based solutions. One of the key aspects of FuseSoC is its ability to rapidly change target devices for example from a AMD Spartan™ 7 to a AMD Artix™ 7 device and then AMD Kintex™ UltraSacle™. Lets take a look at how we can install and work with FuseSoC to port a simple project between several AMD FPGAs.Installing Use SoC FuseSoC is provided as a python package, as such we can install it using pip. For this project I will be using VSCode as my main method of installing and working with FuseSoC.The first thing to do is to, check we have python installedpython --version The next step is to install FuseSoCpip3 install --upgrade fusesoc To check FuseSoC has been installed correctly we can run the commandfusesoc --versionWe should see similar to below FuseSoC Structure FuseSoC provides package management and a build system, as such there some fundamental concepts we need to understand to work effectively with it.The key element of FuseSoC is the core, cores are as one would expect HDL IP. Cores are discovered by the FuseSoC package manager, to enable discovery of the core each core has a name and other information provided in what is called a core file. To help FuseSoC discover the IP cores, the core file has the extension .coreExample Core file One nice thing about FuseSoC is that cores can have dependencies, for example a core which implements an image histogram and interfaces via AXI could be dependent on a core which implements the AXI interfaces.Cores can be stored either locally or remotely. Collections of cores are called core libraries, the simplest implementation of a core library is a directory containing several cores. The FuseSoC build system is able to resolve core dependencies, with respect the top level core. It can also be a remote library located on a git repo on github or bitbucket for example.Of course building FPGA takes more than just the IP cores as such we need to be able to include constraints files and other files also e.g. IP Integrator block diagrams.While the FuseSoC build system, collates all of the files required to build the design the actual implementation in AMD Vivado™ Design Suite uses EDAlize. EDALize abstracts away the project creation process and executes AMD Vivado™ Design Suite to run through synthesis, place & route and bitstream generation.We can use a .core file at the top level to pull together several different core libraries and control the top level entry point and targeting of the final FPGA design for either implementation of simulation. Example .core file for a top level FuseSoC is capable of working with several different libraries, to provide FuseSoC the location of the libraries a file called fusesoc.conf is used. FuseSoC will first look for the.conf file in the current working directory, alternatively if none is found it will look in either home directory (Linux) or Windows %homedirectory%. While we can create this file manually we can use the command, below to create it automatically. fusesoc library add /path/to/directoryExample .conf file Using FuseSoC Lets use FuseSoC to create a simple FPGA design which can be deployed across several different AMD devices.The source code we will use for this project is the UART to AXI Network logic, demonstrated in this project. I intend to target the following boards, Digilent Arty S7, Digilent Arty A7, Alinx KU040.To do this we will be creating one core library called SRC under which I am adding in the three source files for the HDL elements.As I want to also show how we can use AMD Vivado™ Design Suite IP integrator designs and build them with FuseSoC. I am going to include some elements of the design in IP integrator. This approach can be considered a hybrid approach, the IP integrator design will be mapped into a top level VHDL design.As I do not want to create several different build elements in AMD Vivado™ Design Suite for different build versions I am going to create a tcl script which can be run by FuseSoC.This script will instantiate the AXI BRAM controller and BRAM to be connected to the custom RTL modules.# Start a new project or open an existing one in Vivado# Open the IP Integrator design tool
create_bd_design "design_1"
# Add an AXI BRAM Controller
set axi_bram_ctrl [create_bd_cell -type ip -vlnv xilinx.com:ip:axi_bram_ctrl:4.1 axi_bram_ctrl_0]
# Configure the AXI BRAM Controller for AXI4-Lite interface
set_property CONFIG.PROTOCOL {AXI4LITE} [get_bd_cells $axi_bram_ctrl]
# Add a Block RAM (BRAM)
set bram [create_bd_cell -type ip -vlnv xilinx.com:ip:blk_mem_gen:8.4 bram_0]
# Connect the BRAM Controller to the BRAM
connect_bd_intf_net -intf_net S_AXI $axi_bram_ctrl/BRAM_PORTA $bram/BRAM_PORTA
# Make AXI interface, clock, and reset external
# Expose the AXI interface to external ports
make_bd_intf_pins_external [get_bd_intf_pins $axi_bram_ctrl/S_AXI]
# Expose the clock to an external port
make_bd_pins_external [get_bd_pins $axi_bram_ctrl/s_axi_aclk]
# Expose the reset to an external port
make_bd_pins_external [get_bd_pins $axi_bram_ctrl/s_axi_aresetn]
# Assign addresses
assign_bd_address
# Save and validate the design
validate_bd_design
save_bd_design
# Generate the HDL wrapper for the design and capture the generated filename
set wrapper_file [make_wrapper -files [get_files design_1.bd] -top]
# Add the generated wrapper file to the project
add_files $wrapper_file
# Update the project hierarchy to include the new wrapper file
update_compile_order -fileset sources_1This script will create a block diagram as below I will then create a top level RTL file which connects the IP integrator block diagram with the custom RTL modules to complete the design.The custom RTL modules are provided here and also attached to the end of the project along with all of the files.Protocol Filelibrary ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
--Declare entity
entity axi_protocol is
generic(
G_AXIL_DATA_WIDTH :integer := 32; --Width of AXI Lite data bus
G_AXI_ADDR_WIDTH :integer := 32; --Width of AXI Lite Address Bu
G_AXI_ID_WIDTH :integer := 8; --Width of AXI ID Bus
G_AXI_AWUSER_WIDTH :integer := 1 --Width of AXI AW User bus
);
port(
--Master clock & reset
clk :in std_ulogic; --System clock
reset :in std_ulogic; --System reset, async active low
--! Master AXIS Interface
m_axis_tready : in std_logic;
m_axis_tdata : out std_logic_vector(7 downto 0);
m_axis_tvalid : out std_logic;
--! Slave AXIS Interface
s_axis_tready : out std_logic;
s_axis_tdata : in std_logic_vector(7 downto 0);
s_axis_tvalid : in std_logic;
--! AXIL Interface
--!Write address
axi_awaddr : out std_logic_vector(G_AXI_ADDR_WIDTH-1 downto 0);
axi_awprot : out std_logic_vector(2 downto 0);
axi_awvalid : out std_logic;
--!write data
axi_wdata : out std_logic_vector(G_AXIL_DATA_WIDTH-1 downto 0);
axi_wstrb : out std_logic_vector(G_AXIL_DATA_WIDTH/8-1 downto 0);
axi_wvalid : out std_logic;
--!write response
axi_bready : out std_logic;
--!read address
axi_araddr : out std_logic_vector(G_AXI_ADDR_WIDTH-1 downto 0);
axi_arprot : out std_logic_vector(2 downto 0);
axi_arvalid : out std_logic;
--!read data
axi_rready : out std_logic;
--write address
axi_awready : in std_logic;
--write data
axi_wready : in std_logic;
--write response
axi_bresp : in std_logic_vector(1 downto 0);
axi_bvalid : in std_logic;
--read address
axi_arready : in std_logic;
--read data
axi_rdata : in std_logic_vector(G_AXIL_DATA_WIDTH-1 downto 0);
axi_rresp : in std_logic_vector(1 downto 0);
axi_rvalid : in std_logic
);
end entity axi_protocol;
architecture rtl of axi_protocol is
constant C_SINGLE_READ : std_logic_vector(7 downto 0) := x"05";
constant C_SINGLE_WRITE : std_logic_vector(7 downto 0) := x"09";
constant C_NUMB_ADDR_BYTES : integer := 4;
constant C_NUMB_LENGTH_BYTES : integer := 1;
constant C_NUMB_DATA_BYTES : integer := 4;
constant C_NUMB_AXIL_DATA_BYTES : integer := 4;
constant C_NUMB_CRC_BYTES : integer := 4;
constant C_MAX_NUMB_BYTES : integer := 4; -- max number of the above constant for number of bytes
constant C_ZERO_PAD : std_logic_vector(7 downto 0) := (others => '0');
type t_fsm is (idle, address, length, dummy, write_payload, read_payload, crc, write_axil, write_axi, read_axi, read_axil);
type t_op_fsm is (idle, output, check);
type t_array is array (0 to 7) of std_logic_vector(31 downto 0);
type axil_read_fsm is (IDLE, START, CHECK_ADDR_RESP, READ_DATA, DONE);
type axil_write_fsm is (IDLE, START, CHECK_ADDR_RESP, WRITE_DATA, RESP_READY, CHECK_RESP, DONE);
signal write_state : axil_write_fsm;
signal read_state : axil_read_fsm;
signal s_current_state : t_fsm;
signal s_command : std_logic_vector(7 downto 0);
signal s_address : std_logic_vector((C_NUMB_ADDR_BYTES * 8)-1 downto 0);
signal s_length : std_logic_vector(7 downto 0);
signal s_length_axi : std_logic_vector(7 downto 0);
signal s_buf_cnt : unsigned(7 downto 0);
signal s_byte_pos : integer range 0 to C_MAX_NUMB_BYTES;
signal s_num_bytes : integer range 0 to C_MAX_NUMB_BYTES;
signal s_s_tready : std_logic;
signal s_write_buffer : t_array :=(others=>(others=>'0'));
signal s_read_buffer : t_array :=(others=>(others=>'0'));
signal s_write_buffer_temp : std_logic_vector(31 downto 0);
signal s_read_buffer_temp : std_logic_vector(31 downto 0);
--axil lite data interface
signal s_axil_data : std_logic_vector(G_AXIL_DATA_WIDTH-1 downto 0);
signal s_axil_valid : std_logic;
signal s_axil_idata : std_logic_vector(G_AXIL_DATA_WIDTH-1 downto 0);
--axi mstream
signal s_opptr : unsigned(7 downto 0);
signal s_start : std_logic;
signal s_op_state : t_op_fsm;
signal s_op_byte : integer range 0 to C_MAX_NUMB_BYTES;
signal start_read : std_logic;
signal start_write : std_logic;
signal s_m_axis_tvalid : std_logic;
begin
s_axis_tready <= s_s_tready;
FSM : process(clk, reset )
begin
if (reset = '0') then
start_read <= '0';
start_write <= '0';
s_s_tready <= '0';
elsif rising_edge(clk) then
s_s_tready <= '1';
s_start <= '0';
start_read <= '0';
start_write <= '0';
case s_current_state is
when idle => -- to do needs to check the command is valid
s_buf_cnt <= (others =>'0');
if (s_axis_tvalid = '1' and s_s_tready = '1') and
(s_axis_tdata = C_SINGLE_READ or s_axis_tdata = C_SINGLE_WRITE) then
s_s_tready <= '0';
s_command <= s_axis_tdata;
s_current_state <= address;
s_byte_pos <= C_NUMB_ADDR_BYTES;
end if;
when address =>
if s_byte_pos = 0 then
s_s_tready <= '0';
s_byte_pos <= C_NUMB_LENGTH_BYTES;
s_current_state <= length;
elsif s_axis_tvalid = '1' and s_s_tready = '1' then
s_address <= s_address(s_address'length-8-1 downto 0) & s_axis_tdata;
s_byte_pos <= s_byte_pos - 1;
if s_byte_pos = 1 then
s_s_tready <= '0';
end if;
end if;
when length =>
if s_byte_pos = 0 then
s_s_tready <= '0';
if s_command = C_SINGLE_READ and unsigned(s_length) = 1 then
s_current_state <= read_axil;
start_read <= '1';
s_num_bytes <= C_NUMB_AXIL_DATA_BYTES;
elsif s_command = C_SINGLE_WRITE then
s_buf_cnt <= (others =>'0');
s_byte_pos <= C_NUMB_AXIL_DATA_BYTES;
s_num_bytes <= C_NUMB_AXIL_DATA_BYTES;
s_current_state <= write_payload;
end if;
elsif s_axis_tvalid = '1' and s_s_tready = '1' then
s_length <= s_axis_tdata;
s_length_axi <= std_logic_vector(unsigned(s_axis_tdata)-1);
s_byte_pos <= s_byte_pos - 1;
s_s_tready <= '0';
end if;
when read_axil =>
if s_axil_valid = '1' then
s_start <= '1';
s_read_buffer(0)(G_AXIL_DATA_WIDTH-1 downto 0) <= s_axil_data;
end if;
if (read_state = DONE) then
s_current_state <= read_payload;
end if;
when write_payload =>
if s_buf_cnt = unsigned(s_length) then
s_s_tready <= '0';
s_current_state <= write_axil;
start_write <= '1';
else
if s_byte_pos = 0 then
s_s_tready <= '0';
s_byte_pos <= s_num_bytes;
s_write_buffer(to_integer(s_buf_cnt)) <= s_write_buffer_temp;
s_buf_cnt <= s_buf_cnt + 1;
elsif (s_axis_tvalid = '1' and s_s_tready = '1') then
s_write_buffer_temp <= s_write_buffer_temp(s_write_buffer_temp'length-8-1 downto 0) & s_axis_tdata;
s_byte_pos <= s_byte_pos - 1;
if s_byte_pos = 1 then
s_s_tready <= '0';
end if;
end if;
end if;
when write_axil =>
s_s_tready <= '0';
s_axil_idata <= s_write_buffer(0);
if (write_state = DONE) then
s_current_state <= idle;
end if;
when read_payload =>
s_current_state <= idle;
when others => null;
end case;
end if;
end process;
m_axis_tvalid <= s_m_axis_tvalid;
process(clk, reset)
begin
if (reset = '0') then
s_m_axis_tvalid <= '0';
m_axis_tdata <= (others =>'0');
s_opptr <= (others => '0');
s_op_byte <= C_NUMB_AXIL_DATA_BYTES;
elsif rising_edge(clk) then
case s_op_state is
when idle =>
s_m_axis_tvalid <= '0';
if s_start = '1' then
s_opptr <= (others => '0');
s_read_buffer_temp <= s_read_buffer(0);
s_op_byte <= s_num_bytes;
s_op_state <= output;
end if;
when output =>
if s_opptr = unsigned(s_length) then
s_op_state <= idle;
s_m_axis_tvalid <= '0';
else
s_m_axis_tvalid <= '1';
m_axis_tdata <= s_read_buffer_temp(7 downto 0);
if s_op_byte = 0 then
s_op_byte <= s_num_bytes;
s_opptr <= s_opptr + 1;
s_m_axis_tvalid <= '0';
elsif m_axis_tready = '1' then
s_m_axis_tvalid <= '1';
s_read_buffer_temp <= C_ZERO_PAD & s_read_buffer_temp(s_read_buffer_temp'length-1 downto 8);
s_op_byte <= s_op_byte - 1;
s_op_state <= check;
end if;
end if;
when check =>
s_m_axis_tvalid <= '0';
s_op_state <= output;
end case;
end if;
end process;
process(clk, reset)
begin
if (reset = '0') then
write_state <= IDLE;
axi_awaddr <= (others =>'0');
axi_awprot <= (others =>'0');
axi_awvalid <= '0';
axi_wdata <= (others =>'0');
axi_wstrb <= (others =>'0');
axi_wvalid <= '0';
axi_bready <= '0';
elsif rising_edge(clk) then
axi_wstrb <= (others =>'0');
case write_state is
--Send write address
when IDLE =>
if start_write = '1' then
write_state <= START;
end if;
when START =>
axi_awaddr <= s_address;
axi_awprot <= "010";
axi_awvalid <= '1';
axi_wdata <= s_axil_idata;
axi_wvalid <= '1';
axi_wstrb <= (others =>'1');
write_state <= WRITE_DATA;--CHECK_ADDR_RESP;
--Wait for slave to acknowledge receipt
when CHECK_ADDR_RESP =>
if (axi_awready = '1' ) then
axi_awaddr <= (others => '0');
axi_awprot <= (others => '0');
axi_awvalid <= '0';
write_state <= WRITE_DATA;
else
write_state <= CHECK_ADDR_RESP;
end if;
--Send write data
when WRITE_DATA =>
if (axi_awready = '1' ) then
axi_awaddr <= (others => '0');
axi_awprot <= (others => '0');
axi_awvalid <= '0';
axi_wstrb <= (others =>'0');
end if;
axi_wdata <= s_axil_idata;
axi_wvalid <= '1';
axi_wstrb <= (others =>'1');
if (axi_wready = '1') then
write_state <= RESP_READY;
else
write_state <= WRITE_DATA;
end if;
--Set response ready
when RESP_READY =>
axi_wstrb <= (others =>'0');
axi_wvalid <= '0';
axi_bready <= '1';
write_state <= CHECK_RESP;
--Check the response
when CHECK_RESP =>
if (axi_bvalid = '1') then
axi_bready <= '0';
write_state <= DONE;
end if;
--Indicate the transaction has completed
when DONE =>
write_state <= IDLE;
when others =>
write_state <= START;
end case;
end if;
end process;
process(clk, reset)
begin
if (reset = '0') then
read_state <= IDLE;
axi_araddr <= (others =>'0');
axi_arprot <= (others =>'0');
axi_arvalid <= '0';
axi_rready <= '0';
elsif rising_edge(clk) then
case read_state is
when IDLE =>
if start_read = '1' then
read_state <= START;
end if;
--Send read address
when START =>
axi_araddr <= s_address;
axi_arprot <= "010";
axi_arvalid <= '1';
s_axil_valid <= '0';
read_state <= CHECK_ADDR_RESP;
--Wait for the slave to acknowledge receipt of the address
when CHECK_ADDR_RESP =>
if (axi_arready = '1' ) then
axi_araddr <= (others => '0');
axi_arprot <= (others => '0');
axi_arvalid <= '0';
read_state <= READ_DATA;
else
read_state <= CHECK_ADDR_RESP;
end if;
s_axil_valid <= '0';
--Read data from the slave
when READ_DATA =>
s_axil_data <= axi_rdata;
if (axi_rvalid = '1') then
s_axil_valid <= '1';
read_state <= DONE;
else
s_axil_valid <= '0';
read_state <= READ_DATA;
end if;
axi_rready <= '1';
--Indicate the transaction has completed
when DONE =>
axi_rready <= '0';
s_axil_data <= (others => '0');
s_axil_valid <= '0';
read_state <= IDLE;
when others =>
read_state <= START;
end case;
end if;
end process;
end architecture;UART & UART Packagelibrary ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
use ieee.math_real.all;
use work.adiuvo_uart.all;
entity uart is generic (
reset_level : std_logic := '0'; -- reset level which causes a reset
clk_freq : natural := 100_000_000; -- oscillator frequency
baud_rate : natural := 115200 -- baud rate
);
port (
--!System Inputs
clk : in std_logic;
reset : in std_logic;
--!External Interfaces
rx : in std_logic;
tx : out std_logic;
--! Master AXIS Interface
m_axis_tready : in std_logic;
m_axis_tdata : out std_logic_vector(7 downto 0);
m_axis_tvalid : out std_logic;
--! Slave AXIS Interface
s_axis_tready : out std_logic;
s_axis_tdata : in std_logic_vector(7 downto 0);
s_axis_tvalid : in std_logic
);
end entity;
architecture rtl of uart is
constant bit_period : integer := (clk_freq/baud_rate) - 1;
type cntrl_fsm is (idle, set_tx,wait_tx);
type rx_fsm is (idle, start, sample, check, wait_axis);
signal current_state : cntrl_fsm; --:= idle;
signal rx_state : rx_fsm;-- := idle;
signal baud_counter : unsigned(vector_size(real(clk_freq), real(baud_rate)) downto 0) := (others => '0'); --timer for outgoing signals
signal baud_en : std_logic := '0';
signal meta_reg : std_logic_vector(3 downto 0) := (others => '0'); -- fe detection too
signal capture : std_logic_vector(7 downto 0) := (others => '0'); -- data and parity
signal bit_count : integer range 0 to 1023 := 0;
signal pos_count : integer range 0 to 15 := 0;
signal running : std_logic := '0';
signal load_tx : std_logic := '0';
signal complete : std_logic := '0';
signal tx_reg : std_logic_vector(11 downto 0) := (others => '0');
signal tmr_reg : std_logic_vector(11 downto 0) := (others => '0');
signal payload : std_logic_vector(7 downto 0) := (others => '0');
constant zero : std_logic_vector(tmr_reg'range) := (others => '0');
begin
process (reset, clk)
begin
if reset = reset_level then
current_state <= idle;
payload <= (others => '0');
load_tx <= '0';
elsif rising_edge(clk) then
load_tx <= '0';
case current_state is
when idle =>
if s_axis_tvalid = '1' then
current_state <= set_tx;
load_tx <= '1';
payload <= s_axis_tdata;
end if;
when set_tx =>
current_state <= wait_tx;
when wait_tx =>
if complete = '1' then
current_state <= idle;
end if;
when others =>
current_state <= idle;
end case;
end if;
end process;
s_axis_tready <= '1' when (current_state = idle) else '0';
process (reset, clk)
--! baud counter for output TX
begin
if reset = reset_level then
baud_counter <= (others => '0');
baud_en <= '0';
elsif rising_edge(clk) then
baud_en <= '0';
if (load_tx = '1') then
baud_counter <= (others => '0');
elsif (baud_counter = bit_period) then
baud_en <= '1';
baud_counter <= (others => '0');
else
baud_counter <= baud_counter + 1;
end if;
end if;
end process;
process (reset, clk)
--!metastability protection rx signal
begin
if reset = reset_level then
meta_reg <= (others => '1');
elsif rising_edge(clk) then
meta_reg <= meta_reg(meta_reg'high - 1 downto meta_reg'low) & rx;
end if;
end process;
process (reset, clk)
begin
if reset = reset_level then
pos_count <= 0;
bit_count <= 0;
capture <= (others => '0');
rx_state <= idle;
m_axis_tvalid <= '0';
m_axis_tdata <= (others => '0');
elsif rising_edge(clk) then
case rx_state is
when idle =>
m_axis_tvalid <= '0';
if meta_reg(meta_reg'high downto meta_reg'high - 1) = fe_det then
pos_count <= 0;
bit_count <= 0;
capture <= (others => '0');
rx_state <= start;
end if;
when start =>
if bit_count = bit_period then
bit_count <= 0;
rx_state <= sample;
else
bit_count <= bit_count + 1;
end if;
when sample =>
bit_count <= bit_count + 1;
rx_state <= sample;
if bit_count = (bit_period/2) and (pos_count < 8) then
capture <= meta_reg(meta_reg'high) & capture(capture'high downto capture'low + 1);
elsif bit_count = bit_period then
if pos_count = 8 then
rx_state <= check;
else
pos_count <= pos_count + 1;
bit_count <= 0;
end if;
end if;
when check =>
if parity(capture) = '1' then
m_axis_tvalid <= '1';
m_axis_tdata <= capture(7 downto 0);
rx_state <= wait_axis;
else
m_axis_tvalid <= '1';
m_axis_tdata <= capture(7 downto 0);
rx_state <= wait_axis;
end if;
when wait_axis =>
if m_axis_tready = '1' then
m_axis_tvalid <= '0';
rx_state <= idle;
end if;
end case;
end if;
end process;
op_uart : process (reset, clk)
begin
if reset = reset_level then
tx_reg <= (others => '1');
tmr_reg <= (others => '0');
elsif rising_edge(clk) then
if load_tx = '1' then
tx_reg <= stop_bit & not(parity(payload)) & payload & start_bit ;
tmr_reg <= (others => '1');
elsif baud_en = '1' then
tx_reg <= '1' & tx_reg(tx_reg'high downto tx_reg'low + 1);
tmr_reg <= tmr_reg(tmr_reg'high - 1 downto tmr_reg'low) & '0';
end if;
end if;
end process;
tx <= tx_reg(tx_reg'low);
complete <= '1' when (tmr_reg = zero and current_state = wait_tx) else '0';
end architecture;
library ieee;
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
use ieee.math_real.all;
package adiuvo_uart is
function vector_size(clk_freq, baud_rate : real) return integer;
function parity (a : std_logic_vector) return std_logic;
constant fe_det : std_logic_vector(1 downto 0) := "10";
constant start_bit : std_logic := '0';
constant stop_bit : std_logic_vector := "11";
end package;
package body adiuvo_uart is
function vector_size(clk_freq, baud_rate : real) return integer is
variable div : real;
variable res : real;
begin
div := (clk_freq/baud_rate);
res := CEIL(LOG(div)/LOG(2.0));
return integer(res - 1.0);
end;
function parity (a : std_logic_vector) return std_logic is
variable y : std_logic := '0';
begin
for i in a'range loop
y := y xor a(i);
end loop;
return y;
end parity;
end package body adiuvo_uart;Top LevelLIBRARY ieee;
USE ieee.std_logic_1164.all;
USE ieee.numeric_std.all;
entity top_level is
port(
clk : in std_logic;
reset : in std_logic;
rx : in std_logic;
tx : out std_logic
);
-- Declarations
end entity top_level ;
LIBRARY ieee;
USE ieee.std_logic_1164.all;
USE ieee.numeric_std.all;
library UNISIM;
use UNISIM.VCOMPONENTS.ALL;
use ieee.math_real.all;
architecture struct of top_level is
-- Architecture declarations
-- Internal signal declarations
signal S_AXI_0_arready : STD_LOGIC;
signal S_AXI_0_awready : STD_LOGIC;
signal S_AXI_0_bresp : STD_LOGIC_VECTOR( 1 downto 0 );
signal S_AXI_0_bvalid : STD_LOGIC;
signal S_AXI_0_rdata : STD_LOGIC_VECTOR( 31 downto 0 );
signal S_AXI_0_rresp : STD_LOGIC_VECTOR( 1 downto 0 );
signal S_AXI_0_wready : STD_LOGIC;
signal S_AXI_0_wvalid : STD_LOGIC;
signal axi_araddr : std_logic_vector(31 downto 0);
signal axi_arprot : std_logic_vector(2 downto 0);
signal axi_arvalid : std_logic;
signal axi_awaddr : std_logic_vector(31 downto 0);
signal axi_awprot : std_logic_vector(2 downto 0);
signal axi_awvalid : std_logic;
signal axi_bready : std_logic;
signal axi_rready : std_logic;
signal axi_rvalid : std_logic;
signal axi_wdata : std_logic_vector(31 downto 0);
signal axi_wstrb : std_logic_vector(3 downto 0);
signal m_axis_tdata : std_logic_vector(7 downto 0);
signal m_axis_tready : std_logic;
signal m_axis_tvalid : std_logic;
signal s_axis_tdata : std_logic_vector(7 downto 0);
signal s_axis_tready : std_logic;
signal s_axis_tvalid : std_logic;
-- Component Declarations
component axi_protocol
generic (
G_AXIL_DATA_WIDTH : integer := 32; --Width of AXI Lite data bus
G_AXI_ADDR_WIDTH : integer := 32; --Width of AXI Lite Address Bu
G_AXI_ID_WIDTH : integer := 8; --Width of AXI ID Bus
G_AXI_AWUSER_WIDTH : integer := 1 --Width of AXI AW User bus
);
port (
axi_arready : in std_logic;
axi_awready : in std_logic;
axi_bresp : in std_logic_vector (1 downto 0);
axi_bvalid : in std_logic;
axi_rdata : in std_logic_vector (31 downto 0);
axi_rresp : in std_logic_vector (1 downto 0);
axi_rvalid : in std_logic;
axi_wready : in std_logic;
clk : in std_ulogic;
m_axis_tready : in std_logic;
reset : in std_ulogic;
s_axis_tdata : in std_logic_vector (7 downto 0);
s_axis_tvalid : in std_logic;
axi_araddr : out std_logic_vector (31 downto 0);
axi_arprot : out std_logic_vector (2 downto 0);
axi_arvalid : out std_logic;
axi_awaddr : out std_logic_vector (31 downto 0);
axi_awprot : out std_logic_vector (2 downto 0);
axi_awvalid : out std_logic;
axi_bready : out std_logic;
axi_rready : out std_logic;
axi_wdata : out std_logic_vector (31 downto 0);
axi_wstrb : out std_logic_vector (3 downto 0);
axi_wvalid : out std_logic;
m_axis_tdata : out std_logic_vector (7 downto 0);
m_axis_tvalid : out std_logic;
s_axis_tready : out std_logic
);
end component axi_protocol;
component design_1_wrapper
port (
S_AXI_0_araddr : in STD_LOGIC_VECTOR ( 11 downto 0 );
S_AXI_0_arprot : in STD_LOGIC_VECTOR ( 2 downto 0 );
S_AXI_0_arvalid : in STD_LOGIC;
S_AXI_0_awaddr : in STD_LOGIC_VECTOR ( 11 downto 0 );
S_AXI_0_awprot : in STD_LOGIC_VECTOR ( 2 downto 0 );
S_AXI_0_awvalid : in STD_LOGIC;
S_AXI_0_bready : in STD_LOGIC;
S_AXI_0_rready : in STD_LOGIC;
S_AXI_0_wdata : in STD_LOGIC_VECTOR ( 31 downto 0 );
S_AXI_0_wstrb : in STD_LOGIC_VECTOR ( 3 downto 0 );
S_AXI_0_wvalid : in STD_LOGIC;
s_axi_aclk_0 : in STD_LOGIC;
s_axi_aresetn_0 : in STD_LOGIC;
S_AXI_0_arready : out STD_LOGIC;
S_AXI_0_awready : out STD_LOGIC;
S_AXI_0_bresp : out STD_LOGIC_VECTOR ( 1 downto 0 );
S_AXI_0_bvalid : out STD_LOGIC;
S_AXI_0_rdata : out STD_LOGIC_VECTOR ( 31 downto 0 );
S_AXI_0_rresp : out STD_LOGIC_VECTOR ( 1 downto 0 );
S_AXI_0_rvalid : out STD_LOGIC;
S_AXI_0_wready : out STD_LOGIC
);
end component design_1_wrapper;
component uart
generic (
reset_level : std_logic := '0'; -- reset level which causes a reset
clk_freq : natural := 100_000_000; -- oscillator frequency
baud_rate : natural := 115200 -- baud rate
);
port (
clk : in std_logic;
m_axis_tready : in std_logic;
reset : in std_logic;
rx : in std_logic;
s_axis_tdata : in std_logic_vector (7 downto 0);
s_axis_tvalid : in std_logic;
m_axis_tdata : out std_logic_vector (7 downto 0);
m_axis_tvalid : out std_logic;
s_axis_tready : out std_logic;
tx : out std_logic
);
end component uart;
-- Optional embedded configurations
-- pragma synthesis_off
for all : axi_protocol use entity src.axi_protocol;
for all : design_1_wrapper use entity src.design_1_wrapper;
for all : uart use entity src.uart;
-- pragma synthesis_on
begin
-- Instance port mappings.
U_0 : axi_protocol
generic map (
G_AXIL_DATA_WIDTH => 32, --Width of AXI Lite data bus
G_AXI_ADDR_WIDTH => 32, --Width of AXI Lite Address Bu
G_AXI_ID_WIDTH => 1, --Width of AXI ID Bus
G_AXI_AWUSER_WIDTH => 1 --Width of AXI AW User bus
)
port map (
clk => clk,
reset => reset,
m_axis_tready => m_axis_tready,
m_axis_tdata => m_axis_tdata,
m_axis_tvalid => m_axis_tvalid,
s_axis_tready => s_axis_tready,
s_axis_tdata => s_axis_tdata,
s_axis_tvalid => s_axis_tvalid,
axi_awaddr => axi_awaddr,
axi_awprot => axi_awprot,
axi_awvalid => axi_awvalid,
axi_wdata => axi_wdata,
axi_wstrb => axi_wstrb,
axi_wvalid => S_AXI_0_wvalid,
axi_bready => axi_bready,
axi_araddr => axi_araddr,
axi_arprot => axi_arprot,
axi_arvalid => axi_arvalid,
axi_rready => axi_rready,
axi_awready => S_AXI_0_wready,
axi_wready => S_AXI_0_awready,
axi_bresp => S_AXI_0_bresp,
axi_bvalid => S_AXI_0_bvalid,
axi_arready => S_AXI_0_arready,
axi_rdata => S_AXI_0_rdata,
axi_rresp => S_AXI_0_rresp,
axi_rvalid => axi_rvalid
);
U_1 : design_1_wrapper
port map (
S_AXI_0_araddr => axi_araddr(11 downto 0),
S_AXI_0_arprot => axi_arprot,
S_AXI_0_arready => S_AXI_0_arready,
S_AXI_0_arvalid => axi_arvalid,
S_AXI_0_awaddr => axi_awaddr(11 downto 0),
S_AXI_0_awprot => axi_awprot,
S_AXI_0_awready => S_AXI_0_awready,
S_AXI_0_awvalid => axi_awvalid,
S_AXI_0_bready => axi_bready,
S_AXI_0_bresp => S_AXI_0_bresp,
S_AXI_0_bvalid => S_AXI_0_bvalid,
S_AXI_0_rdata => S_AXI_0_rdata,
S_AXI_0_rready => axi_rready,
S_AXI_0_rresp => S_AXI_0_rresp,
S_AXI_0_rvalid => axi_rvalid,
S_AXI_0_wdata => axi_wdata,
S_AXI_0_wready => S_AXI_0_wready,
S_AXI_0_wstrb => axi_wstrb,
S_AXI_0_wvalid => S_AXI_0_wvalid,
s_axi_aclk_0 => clk,
s_axi_aresetn_0 => reset
);
U_2 : uart
generic map (
reset_level => '0', -- reset level which causes a reset
clk_freq => 100_000_000, -- oscillator frequency
baud_rate => 115200 -- baud rate
)
port map (
clk => clk,
reset => reset,
rx => rx,
tx => tx,
m_axis_tready => s_axis_tready,
m_axis_tdata => s_axis_tdata,
m_axis_tvalid => s_axis_tvalid,
s_axis_tready => m_axis_tready,
s_axis_tdata => m_axis_tdata,
s_axis_tvalid => m_axis_tvalid
);
end architecture struct;Creating the XDCs The only difference between the three implementations that I am going to do is in the constraint files. We will need to create one constraint for each of the target boards.AMD Spartan™ 7set_property PACKAGE_PIN R2 [get_ports clk]
set_property IOSTANDARD LVCMOS33 [get_ports clk]
create_clock -period 10.000 -name sys_clk [get_ports clk]
set_property PACKAGE_PIN L17 [get_ports reset]
set_property PACKAGE_PIN L18 [get_ports rx]
set_property PACKAGE_PIN M14 [get_ports tx]
# set I/O standard
set_property IOSTANDARD LVCMOS33 [get_ports reset]
set_property IOSTANDARD LVCMOS33 [get_ports rx]
set_property IOSTANDARD LVCMOS33 [get_ports tx]AMD Artix™ 7set_property PACKAGE_PIN E3 [get_ports clk]
set_property IOSTANDARD LVCMOS33 [get_ports clk]
create_clock -period 10.000 -name sys_clk [get_ports clk]
set_property PACKAGE_PIN G13 [get_ports reset]
set_property PACKAGE_PIN B11 [get_ports rx]
set_property PACKAGE_PIN A11 [get_ports tx]
# set I/O standard
set_property IOSTANDARD LVCMOS33 [get_ports reset]
set_property IOSTANDARD LVCMOS33 [get_ports rx]
set_property IOSTANDARD LVCMOS33 [get_ports tx]AMD Kintex™ UltraSacle™ set_property PACKAGE_PIN AF9 [get_ports clk]
set_property IOSTANDARD LVCMOS33 [get_ports clk]
create_clock -period 10.000 -name sys_clk [get_ports clk]
set_property PACKAGE_PIN AE8 [get_ports reset]
set_property PACKAGE_PIN AE10 [get_ports rx]
set_property PACKAGE_PIN AD10 [get_ports tx]
# set I/O standard
set_property IOSTANDARD LVCMOS33 [get_ports reset]
set_property IOSTANDARD LVCMOS33 [get_ports rx]
set_property IOSTANDARD LVCMOS33 [get_ports tx]Creating the FuseSoC Core With the RTL and script created the next step is to create the.core file and.conf file.The first thing to do is to create the.core file this will be split into several sections, the first bit is to define the CAPI version and the core library, providing its name and descriptionCAPI=2:
name: adiuvo::hackster:0.1
description: Implementation for Hackster ProjectThe next step is to create the filesets, these are split into several different groups. The first of these I have named the core group and these are the files which are common across all of the implementations.For each of these files we also define the library and the file type which for this example is vhdl.The next step is to define the tcl scripts which create the IP Integrator design. As there is no difference in configuration between the three target boards. This file is also common across all implementations.If we were creating a Zynq or Zynq MPSoC design which requires a specific board configuration, we would need variants of the file for each board which defined the PS configuration.The next file sets are the IO constraints, there is one file set for each of the target boards required.filesets:
core:
files:
- src/protocol.vhd : {logical_name: work}
- src/uart_pkg.vhd : {logical_name: work}
- src/uart.vhd : {logical_name: work}
- src/top_level.vhd : {logical_name: work}
file_type: vhdlSource
vivado_files_tcl:
files:
- src/build_ip.tcl: {file_type: tclSource}
artix_io:
files:
- constraints/artix7.xdc : {file_type : xdc}
kintex_io:
files:
- constraints/kintexus.xdc : {file_type : xdc}
spartan_io:
files:
- constraints/spartan.xdc : {file_type : xdc}The final step is to define the targets, here I define a default target which contains the core fileset. I then define three more targets, one for each of the target boards. For each target we define the tool to be AMD Vivado™ Design Suite, and append the filesets required for that particular target.In this case it is the IO fileset and the tcl scripts, to demonstrate how you would use the TCL script if each target was different.For each target we also need to define the top level module and of course the target device in AMD Vivado™ Design Suite.targets:
default: &default
filesets : [core]
artix7:
<<: *default
default_tool: vivado
filesets_append : [vivado_files_tcl, artix_io]
toplevel : top_level
tools:
vivado:
part : XC7A35TI-CSG324-1L
spartan7:
<<: *default
default_tool: vivado
filesets_append : [vivado_files_tcl, spartan_io]
toplevel : top_level
tools:
vivado:
part : xc7s50-csga324-1
kintexus:
<<: *default
default_tool: vivado
filesets_append : [vivado_files_tcl, kintex_io]
toplevel : top_level
tools:
vivado:
part : xcku040-ffva1156-2-iWith the.core file completed we can double check that we are able to see the library we have just defined.The next stage is to define the fusesoc.conf file defining the location of the cores[library.hackster]
location = C:/hdl_projects/hackster_fusesoc
sync-uri = C:/hdl_projects/hackster_fusesoc/
sync-type = local
auto-sync = falseThis is very simple, as all we have in this example is one core library called Hackster.We can check this using the commandfusesoc core listThis should provide a output similar to the below FuseSoC Results With the source code created we can build the three examples by running he commandsAMD Artix™ 7 fusesoc --verbose run --target=artix7 --no-export hacksterAMD Kintex™ UltraSacle™ fusesoc --verbose run --target=kintexus--no-export hacksterAMD Spartan™ 7 fusesoc --verbose run --target=spartan7--no-export hacksterYou will see the transcript of the implementation scroll past as the project builds. Once completed you will, see a message showing the bitstream generation has been completed. We can run these commands and will see a build directory Looking under the build directory we will see a directory named after the core and under that a directory for each target and associated AMD Vivado™ Design Suite Project. Examining one of the projects you will see the project and all of the scripts created by FuseSoC. You will be able to find the bit file under the <project name>/runs directory Wrap Up This project has outlined how we are able to script our FPGA implementations using FuseSoC which enables us to easily and simply target a new FPGA device. As FuseSoC is a package manager and build system it allows us to work with our libraries of IP components while also providing the ability to with IP Integrator to leverage IP from AMD Vivado™ Design Suite.While I have not covered it in this project we are able to use FuseSoC for verification, due to its support for a range of simulators.